Siqi Shang, Mingyo Seo, Yuke Zhu, Lillian Chin
Under review at IEEE RA-L
arXiv | Website
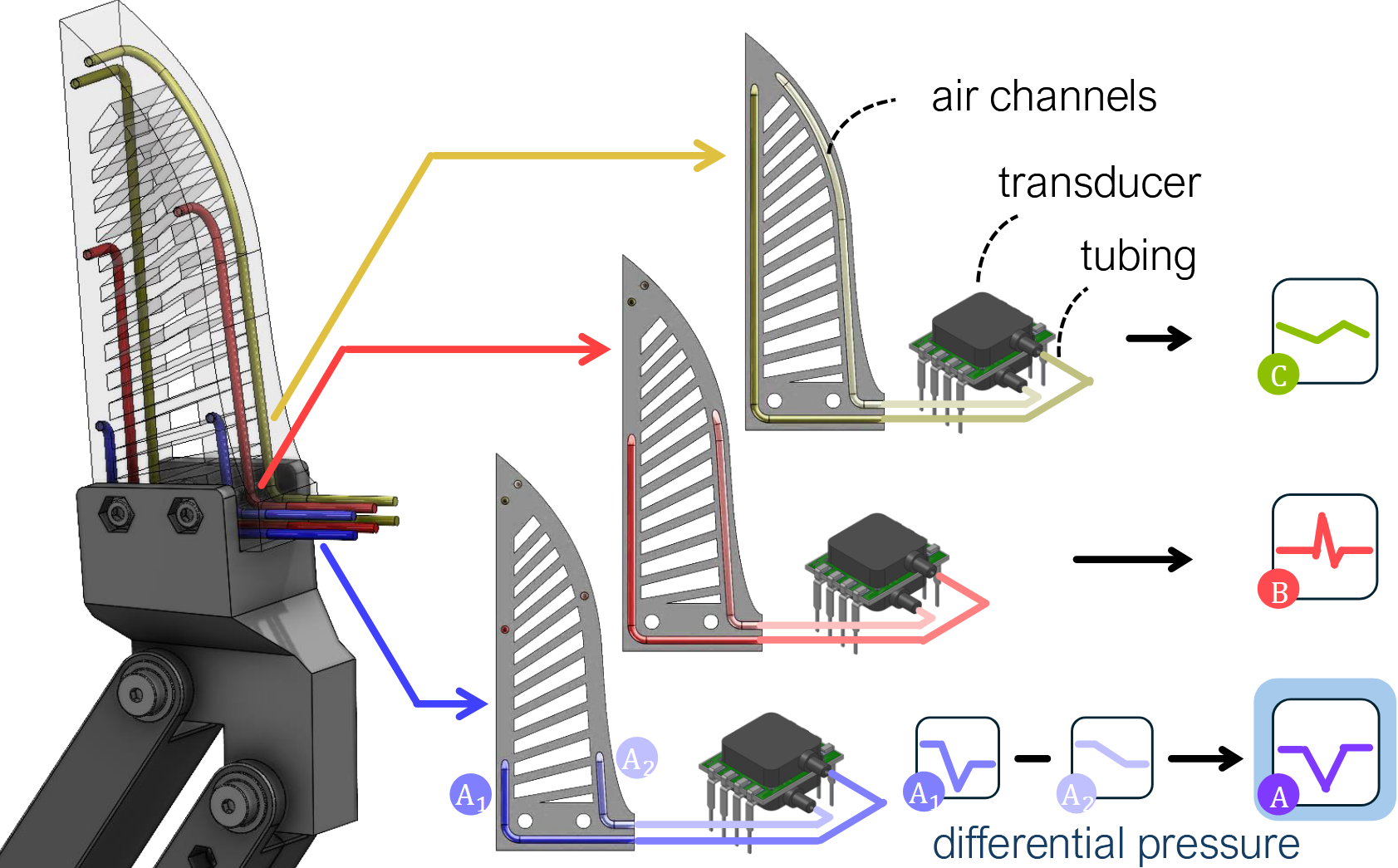
We create FORTE, 3D-printed finrays with internal force and slip sensing. By measuring the pressure change of embedded air channels at 2 kHz, FORTE can accurately estimate grasping forces from 0-8 N with an average error of 0.2 N, and detect slip events within 100 ms of occurring using an analytical model. FORTE grasps fragile objects like raspberries and potato chips with a 98.6% success rate, and achieves 93% accuracy in detecting slip events across 310 trials.
Gu-Cheol Jeong, Stefano Dalla Gasperina, Ashish D. Deshpande, Lillian Chin*, Roberto Martín-Martín*
Accepted and in-press at IEEE RA-L
arXiv | Website
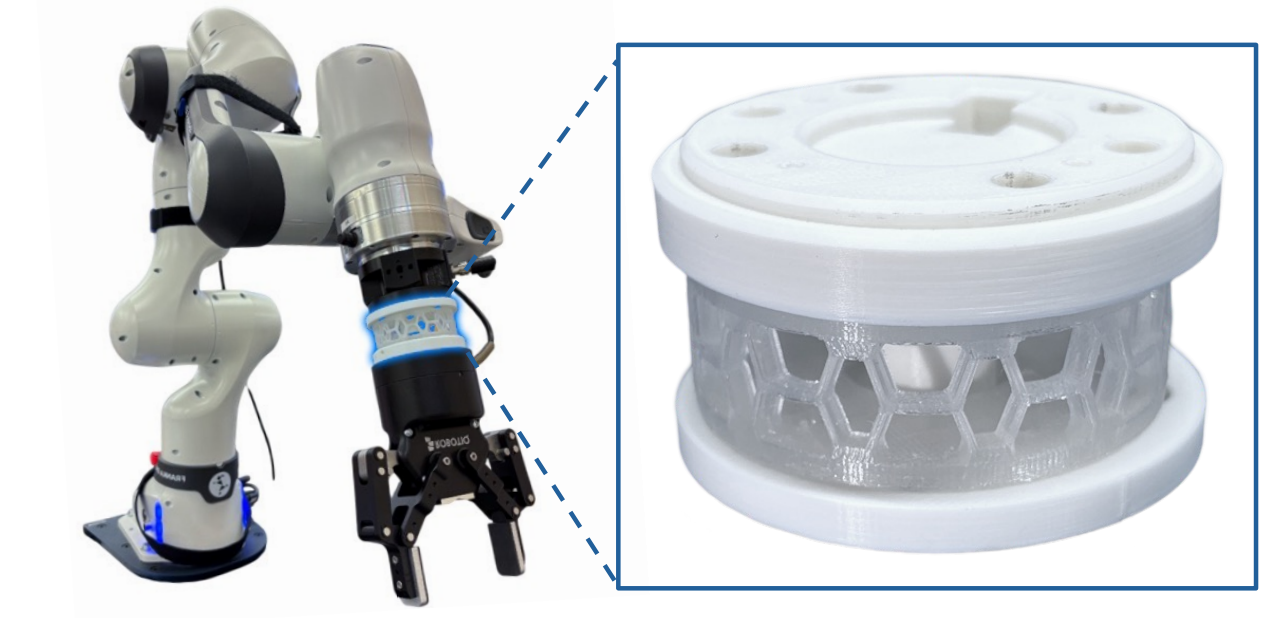
We create BiFlex, a flexible 3D-printed wrist that uses buckling to passively switch from a high stiffness precision mode to a low stiffness compliant mode. BiFlex is easily generalizable to many robot end effectors while simplifying control.
Lillian Chin, Gregory Xie, Jeffrey Lipton, and Daniela Rus
ICRA 2025
Paper
We create soft modular robots that can expand 1.57x in 0.2 seconds. We achieve this through a scissors-like bi-layer auxetic design, increasing the expansion ratio. We can use these robots as the basis of larger structures, including 2D bending and 3D cube flipping.

Gregory Xie, Lillian Chin, Byungchul Kim, Rachel Holladay, and Daniela Rus
IROS 2024
Paper
We create FROG (Flexible Robust Observant Gripper) that is soft yet strong. FROG is made of soft flexure-based fingers that are encircled by Bowen tubes. By pulling on these tubes, we can exert a significant amount of force while remaining compliant. We develop controllers to grasp heavy and delicate objects and demonstrate them across a wide range of household objects.

Carlos Sandoval Olascoaga, Lillian Chin, Josefina Correa Menendez, Reid Kovacs, Calvin Zhong & Nicholas de Monchaux
Book chapter in Improving Technology Through Ethics (Springer, 2024)
Chapter
Traditionally, civic planning technology has not been created in dialogue with communities. We discuss a new approach to technology development that centers community-based collaborative planning. We present a history of Geospatial Information Systems (GIS) and our ongoing work with Green City Force to make technology that addresses racial, economic and environmental justice in New York City Housing Authority communities.
Annan Zhang*, Lillian Chin*, Daniel L. Tong, Daniela Rus
ICRA 2024
Paper
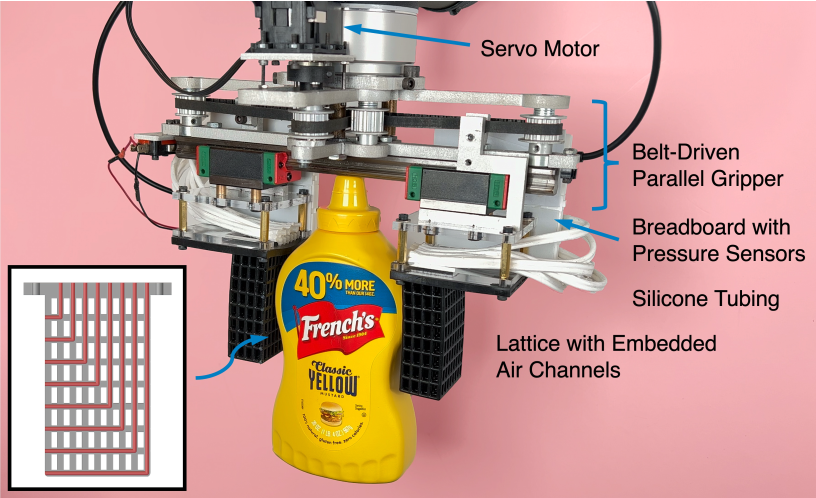
We create a sensorized parallel jaw gripper by printing cubic lattice fingers with embedded air channels. Through 3D printing, we have significantly more control over the location and positioning of the channel sensors. After characterizing the sensor performance from compression, bending and time-dependent effects, we use the gripper to estimate the weight and location of grasped objects. We are able to imitate vision-based tactile sensor results with only 12 sensors.
Valerie Chen*, Lillian Chin*, Jeana Choi*, Annan Zhang*, Daniela Rus
RoboSoft 2024
Paper | Video | TechCrunch | Popular Science
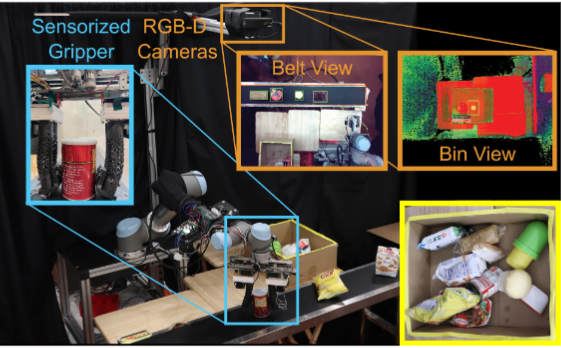
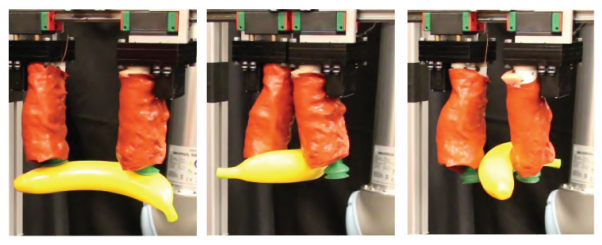
We combine external vision, soft tactile sensors and motor-based proprioception to create an autonomous grocery packing system. In real-time, our system can grasp an object off a conveyor belt, estimate its size and stiffness and pack a box. Combining multiple modes of sensor feedback reduces in 9x fewer damaging packs than a sensor-less baseline and 4.5x fewer damaging packs than a vision-only baseline.
Gregory Xie, Rachel Holladay, Lillian Chin, Daniela Rus
IEEE RA-L, 2023. Also presented at ICRA@40
Paper
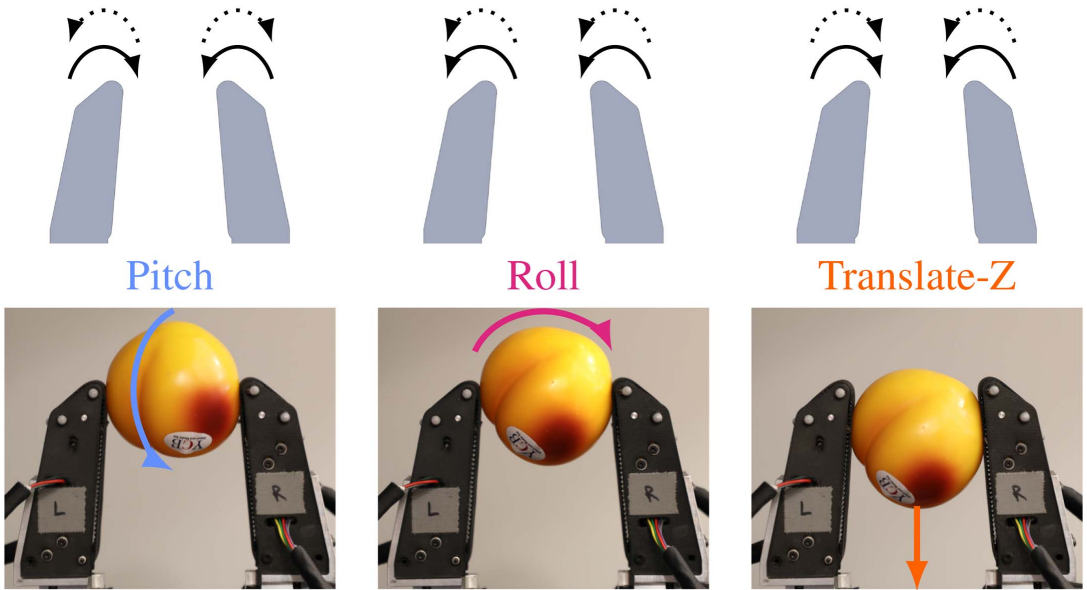
We create BOP (Belt Orienting Phalanges), a parallel-jaw gripper where each finger has two sets of belts embedded within. By controlling each of the belts, we can control a grasped object’s roll, pitch and translation. We demonstrate several instances of in-hand manipulation, including fingernail-style lifting of a thing object and screwing in a lightbulb.
Annan Zhang*, Tsun-Hsuan Wang*, Ryan L. Truby, Lillian Chin, Daniela Rus
IROS 2023
Paper
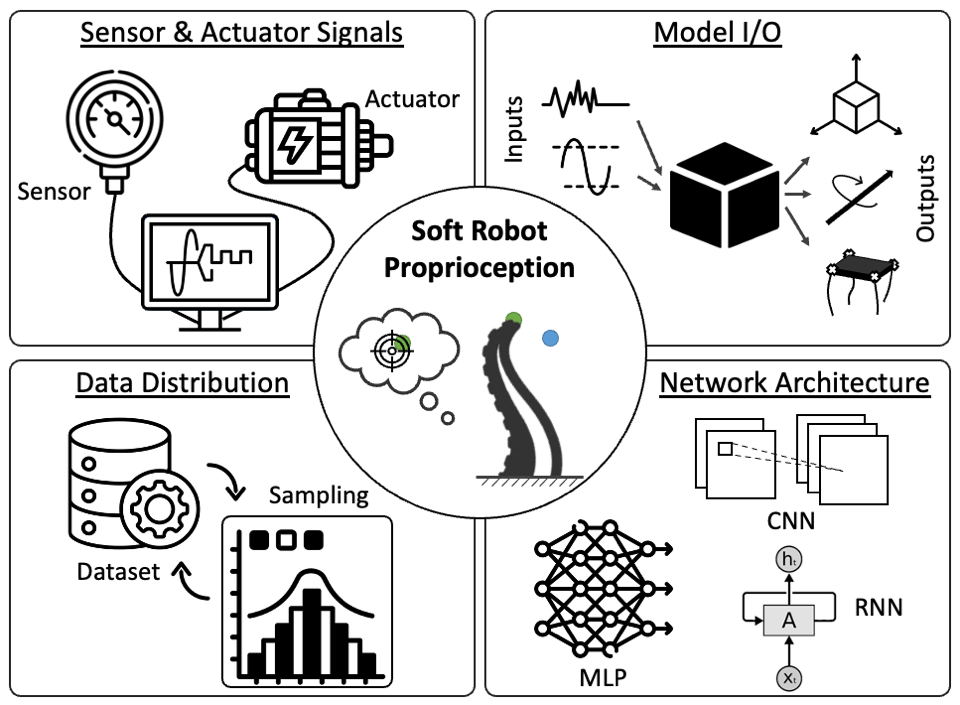
Based on experiments on two large soft robotics datasets, we derive best practices for training neural networks that map sensor signals to soft robot shape. Specifically, we analyze a handed shearing auxetic based robot platform with internal pressure-based sensors and a pneumatic trunk with external piezoresistive strain sensors. This analysis suggest several best practices for training a neural net on soft robotics: using relative inputs, including the actuator position, and using gated recurrent units or long short-term memory networks.
Maximillian Stölzle, Lillian Chin, Ryan L. Truby, Daniela Rus, Cosimo Della Santina
RoboSoft 2023.
Paper
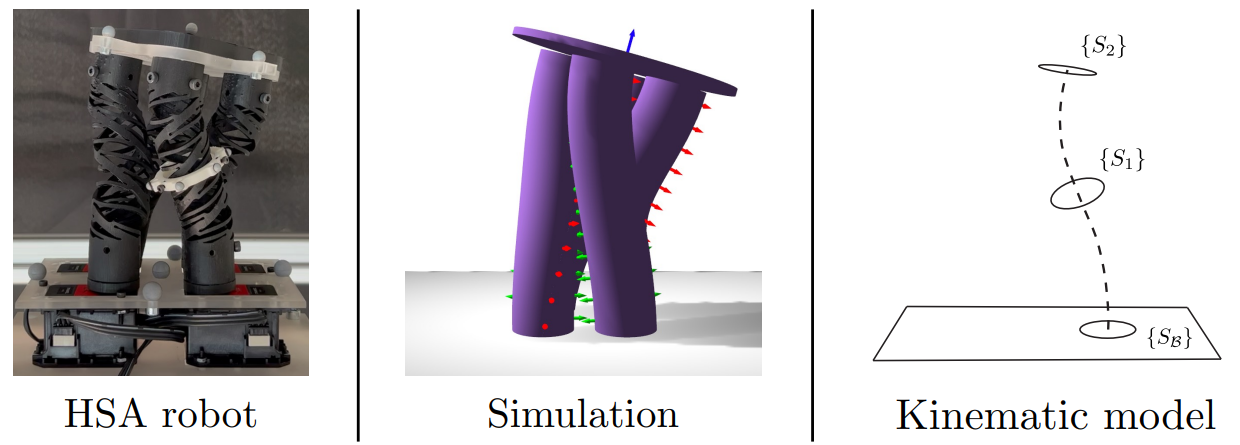
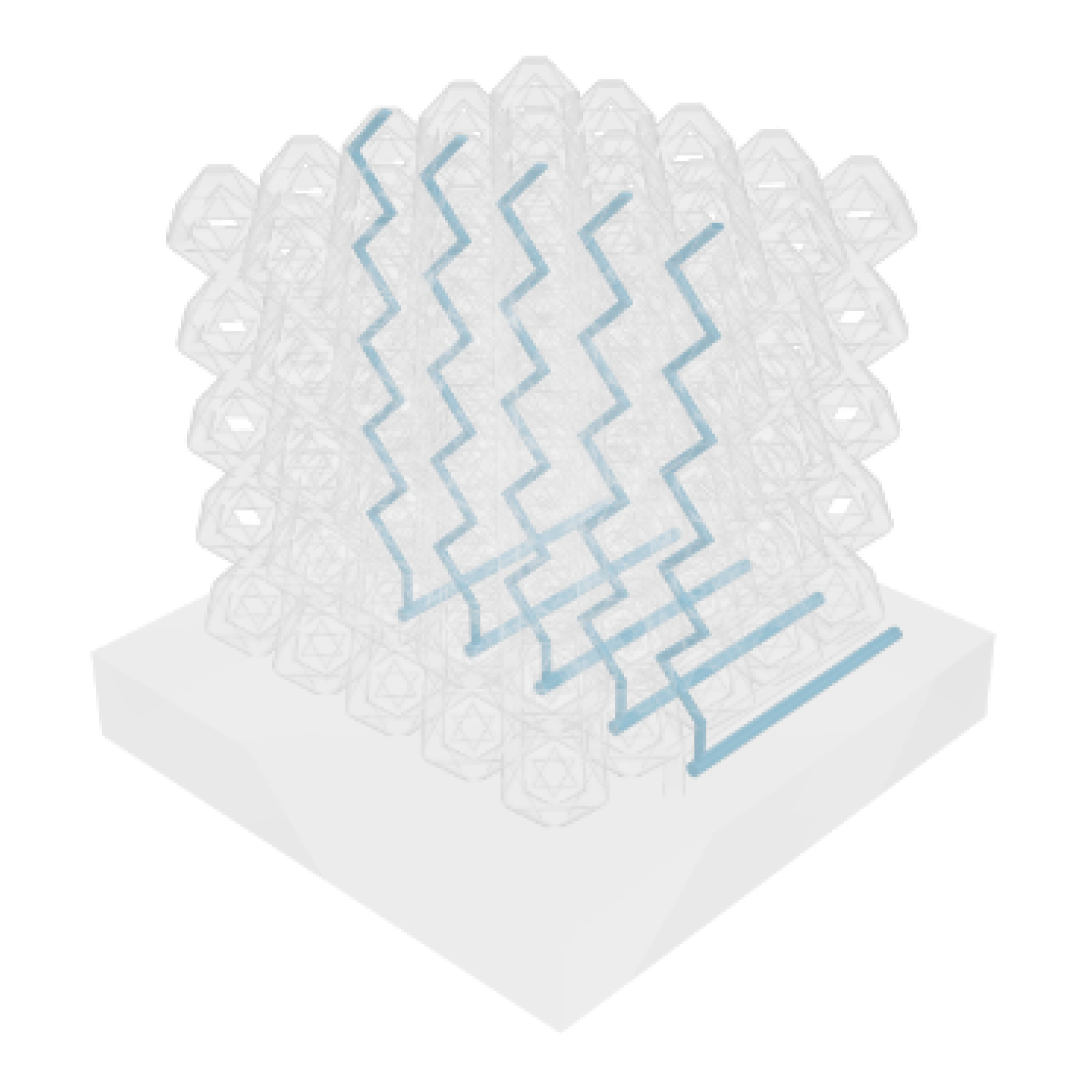
This paper extends discrete Cosserat rod models to model the movement of handed shearing auxetics (HSAs). By translating the auxetic trajectories to a Cosserat rod + piecewise constant strain model, we can model a four degree of freedom robotic HSA platform to an accuracy of 0.3 mm for position and 0.07 radians for orientation.
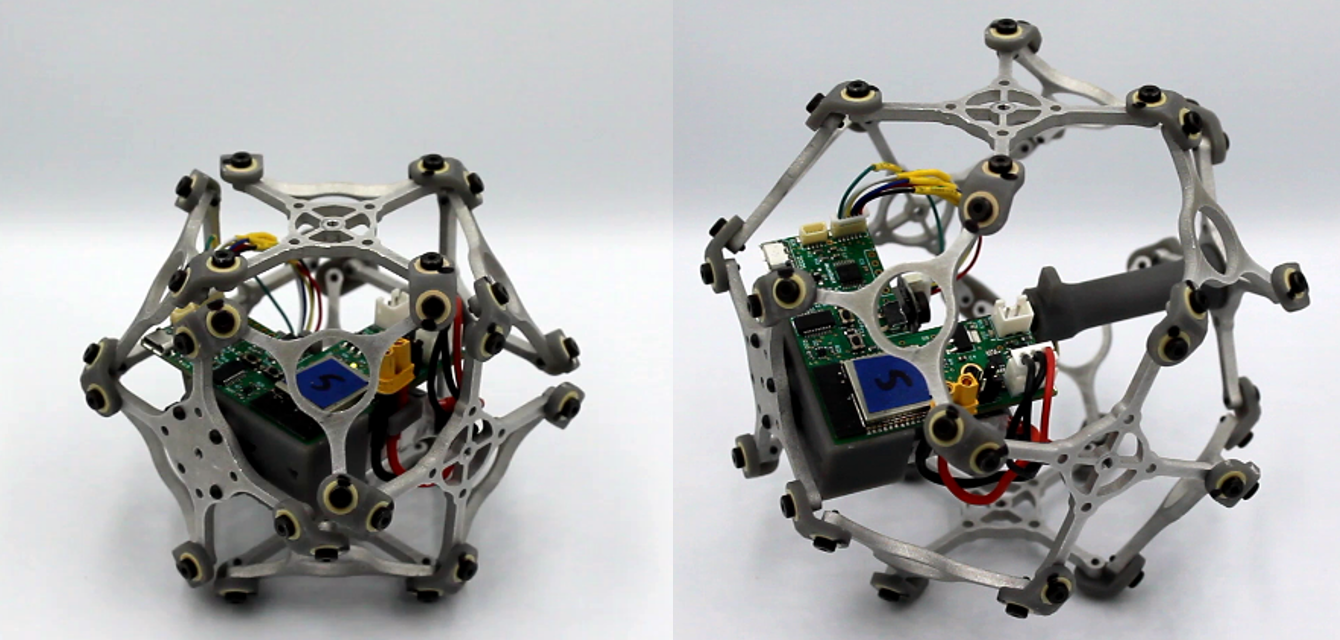
Lillian Chin, Max Burns*, Gregory Xie*, Daniela Rus
IEEE RA-L, 2022. Also presented at ICRA 2022.
Paper | ICRA Talk | Mashable
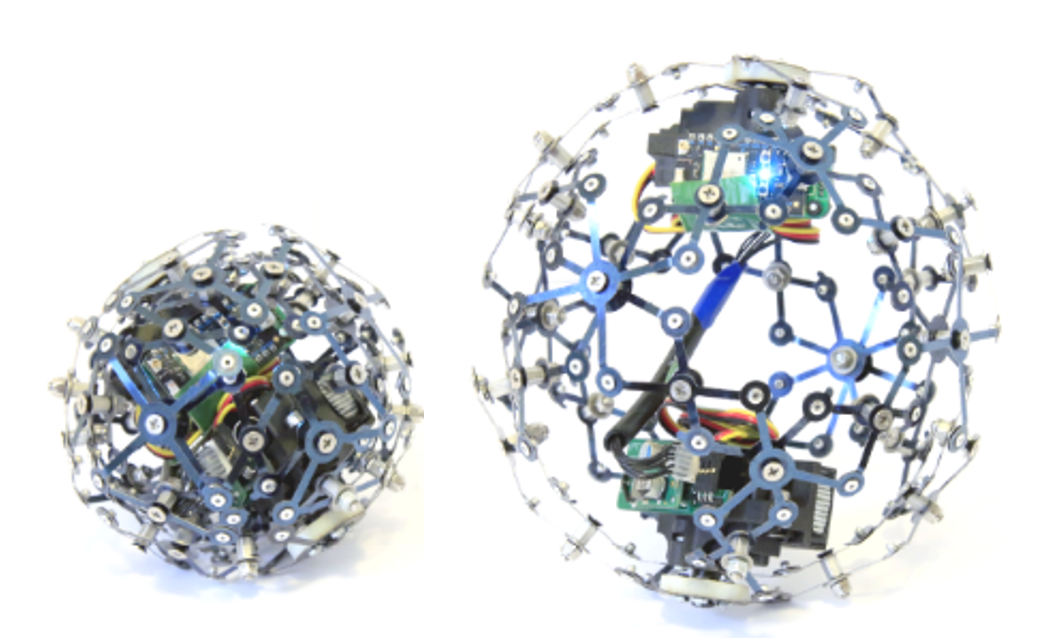
We create a force-focused version of our previous expanding robot spheres. By driving an aluminum version of the jitterbug with a leadscrew, we created an expanding robot that can expand 1.6x its original size and exert an expansion force 76x its own weight. When this robot was used as a module for a larger robot, the overall structure was an order of magnitude faster than existing modular robots and could haul 1.5x its own weight, even with some modules stalling
Annan Zhang, Ryan L. Truby, Lillian Chin, Shuguang Li, Daniela Rus
IEEE RA-L, 2022. Also presented at IROS 2022.
Paper
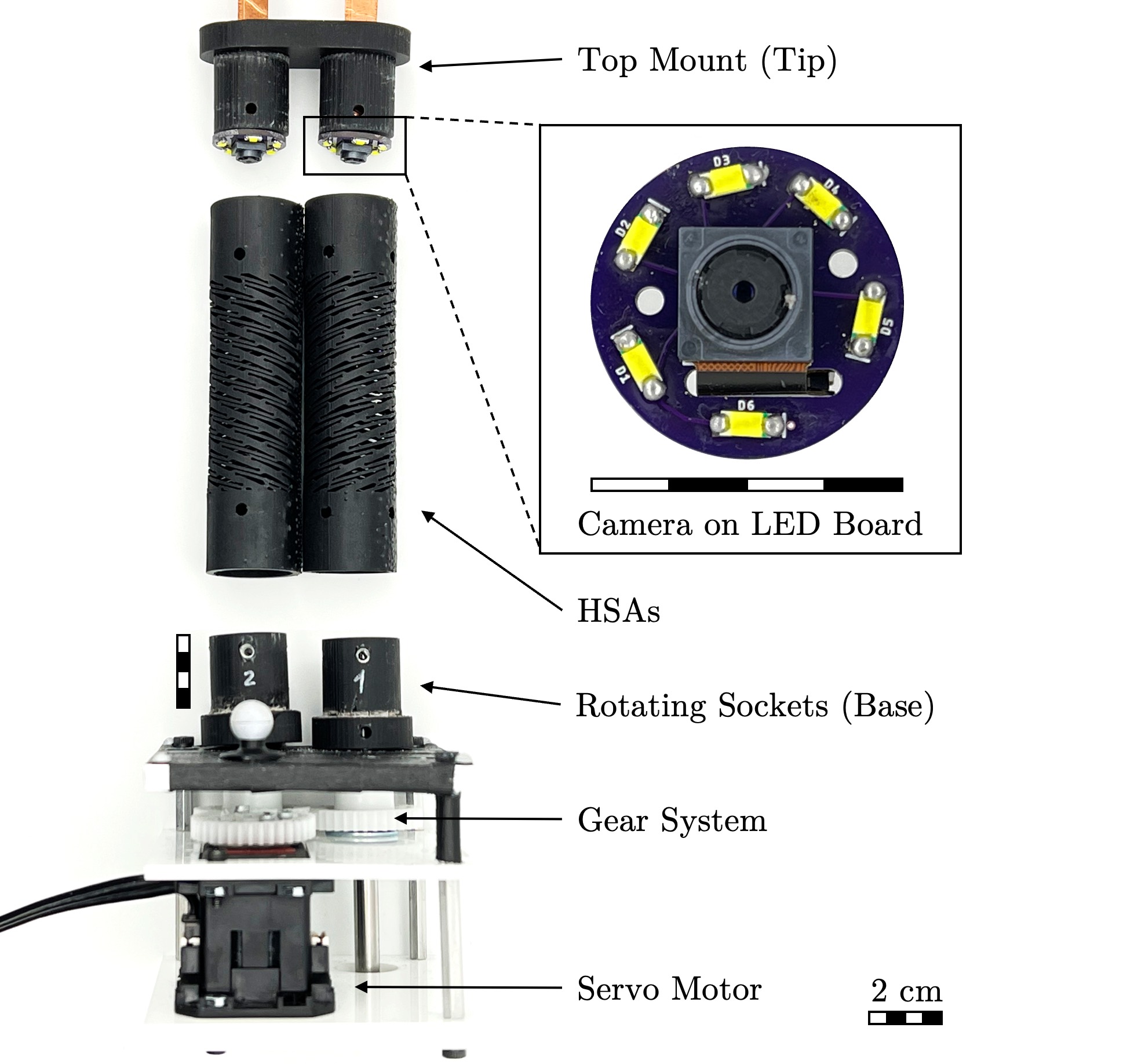
We use cameras to record the interior of compliant electric actuators and train a neural network that maps the visual feedback to the actuator’s tip pose. Our method presents a robust approach for sensorizing hollow-bodied actuators and provides accurate predictions in the presence of external disturbances.
Ryan L. Truby*, Lillian Chin*, Annan Zhang, Daniela Rus
Science Advances, 2022
Paper | MIT News
We develop a new sensorization technique: embed empty air-filled channels within a 3D printed structure. As the structure is moved or pressed, the channels will report a measurable change in pressure. Using this technique, we collected the largest soft robotics movement dataset (18 hours). This allowed us to predict a 4 degree-of-freedom robotic platform’s movement to within 8% error, using only 12 sensors
Brandon Araki, Jeana Choi, Lillian Chin, Xiao Li, Daniela Rus
IEEE RA-L, 2021.
Paper
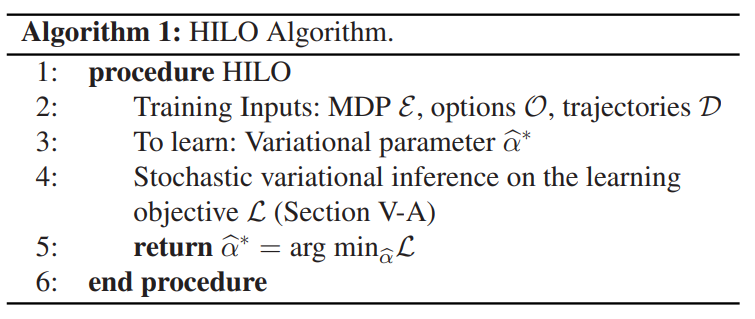
We present Hierarchical Inference with Logical Options (HILO), a Bayesian model that operates on linear temporal logic (LTL) formulas. By operating over LTL formulas and low-level trajectories, the model is able to find an optimal policy while maintaining interpretability. HILO outperforms other methods on planning tasks and is validated in the real world on a grocery packing task.

Lillian Chin
First Monday, 2021.
Paper | CUNY, Queens College Talk
The author conducts an autoethnography about her experiences on Jeopardy, an American TV show. By reflecting on the harassment she got, she connects her experience to other people who were “publicly famed” exposing a gap in the critical literature on celebrity. She introduces the technique of “radical reciprocity” as a way to combat the effects of unwanted fame, on both the temporalities of celebrity and microcelebrity.
Andy Spielberg*, Alexander Amini*, Lillian Chin, Woijech Matusik, Daniela Rus
IEEE RA-L, 2021. Nominated for Best Paper at Robosoft 2021
Paper | Video | MIT News
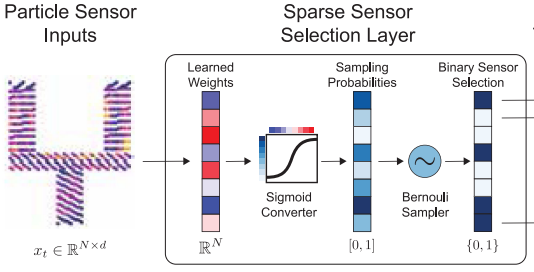
We introduce a machine learning technique to design a soft robot’s sensor placement for a specific task. We assume that the soft robot is simulated using the material point method and then sparsify the number of sensors in the overall structure while maintaining high performance. We demonstrate the viability of this task in simulation for grasp prediction, learned proprioception and control of a quadruped. Our method significantly outperforms human and machine learning baselines and is resistant to sensor noise.

Ryan L. Truby*, Lillian Chin*, Daniela Rus
IEEE RA-L, 2021. Also presented at Robosoft 2021
Paper
We introduce a new way of fabricating handed shearing auxetic fingers. Rather than laser cutting them, we print them using a resin-based printer. This allows us to experiment with more materials and make more modifications to the underlying geometry without sacrificing resolution.
Lillian Chin, Felipe Barscevicius, Jeffrey Lipton, Daniela Rus
ICRA 2020
Paper | Video | ICRA Talk
Rather than have separate systems for different grasping modes, we introduce multiplexed manipulation: a gripper that combines parallel jaw, suction and soft finger grasping into one system. By combining these different modes together, we are able to grasp 20% more objects than single grasping modes alone. We are also able to perform rudimentary in-hand manipulation with flat objects by suctioning them up and pinching them between the fingers.

Jeffrey Lipton, Lillian Chin, Jacob Miske, Daniela Rus
IROS 2019
Paper | PDF
We use the mathematical model of “rotating polygons for auxetic materials” to create robots that can expand at will by rotating one degree-of-freedom. These spring-steel robots can expand 1.2x their original volume in 0.25 seconds. We demonstrate how these robots can perform vertical tube crawling through peristaltic locomotion.
Lillian Chin, Jeffrey Lipton, Michelle C Yuen, Rebecca Kramer-Bottiglio, Daniela Rus
Won Best Poster at Robosoft 2019
Paper | Video | BBC | Scientific American | CNBC
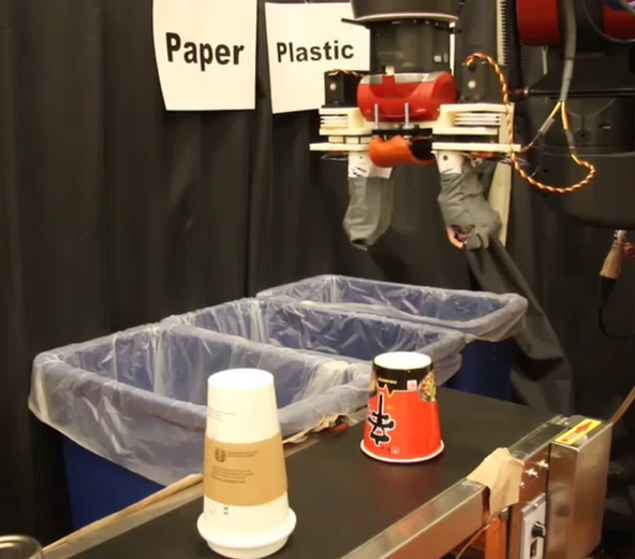
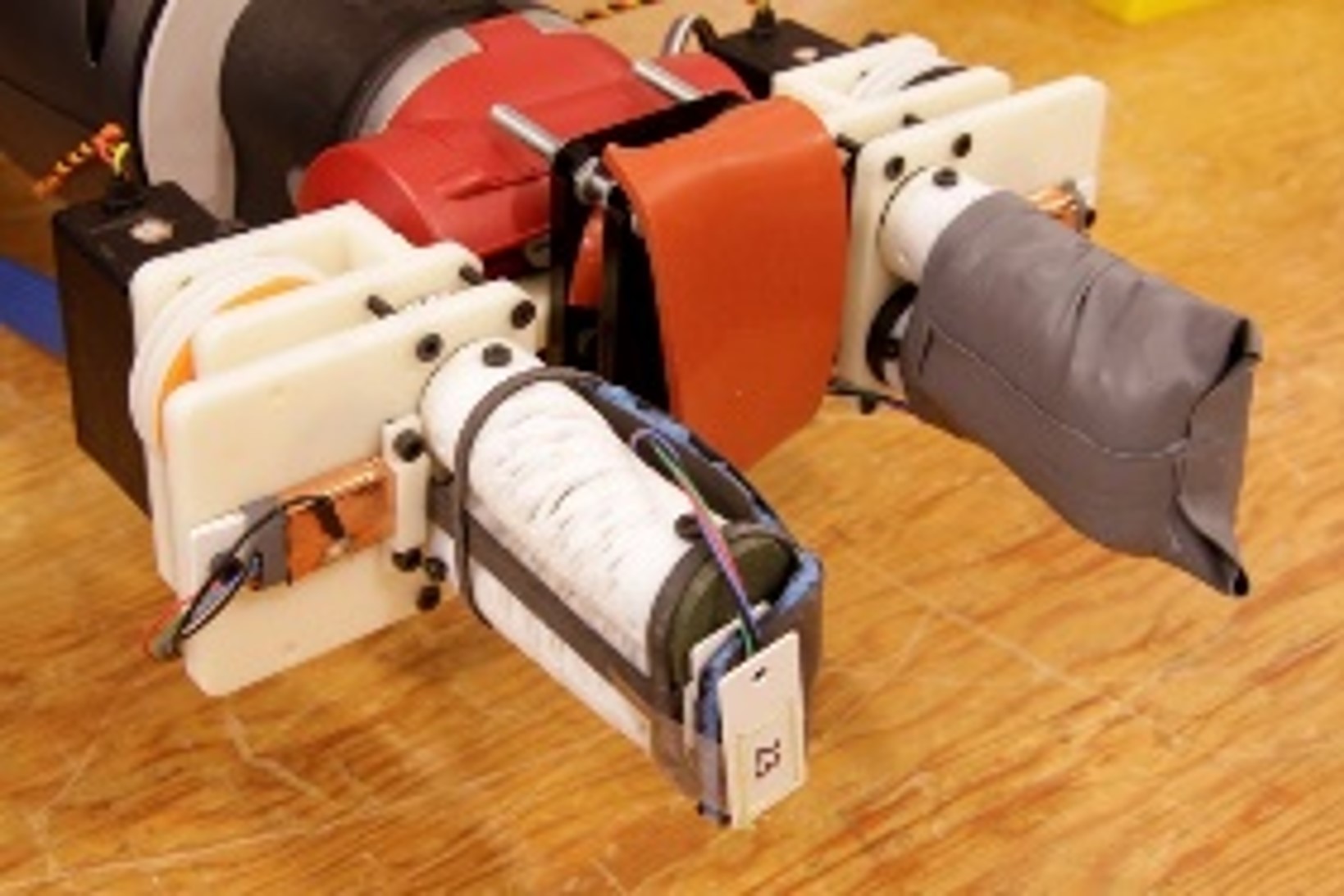
Through collaboration with Michelle Yuen’s soft capactitve strain and pressure sensors, we extended our stiffness and size algorithm to now sort objects based on material: metal, paper and plastic. We demonstrated this on a mock recycling system, demonstrating how the overall system was puncture resistant and effective on pathological examples.
Lillian Chin, Michelle C Yuen, Jeffrey Lipton, Luis H Trueba, Rebecca Kramer-Bottiglio, Daniela Rus
ICRA 2019
Paper | Video
Through collaboration with Michelle Yuen’s soft capactitve strain and pressure sensors, we created a simple hand that could tell the stiffness and size of objects. With linear regression and a test set of 4 objects, we could estimate radius to within 33% and tell hard from soft with 78% accuracy.
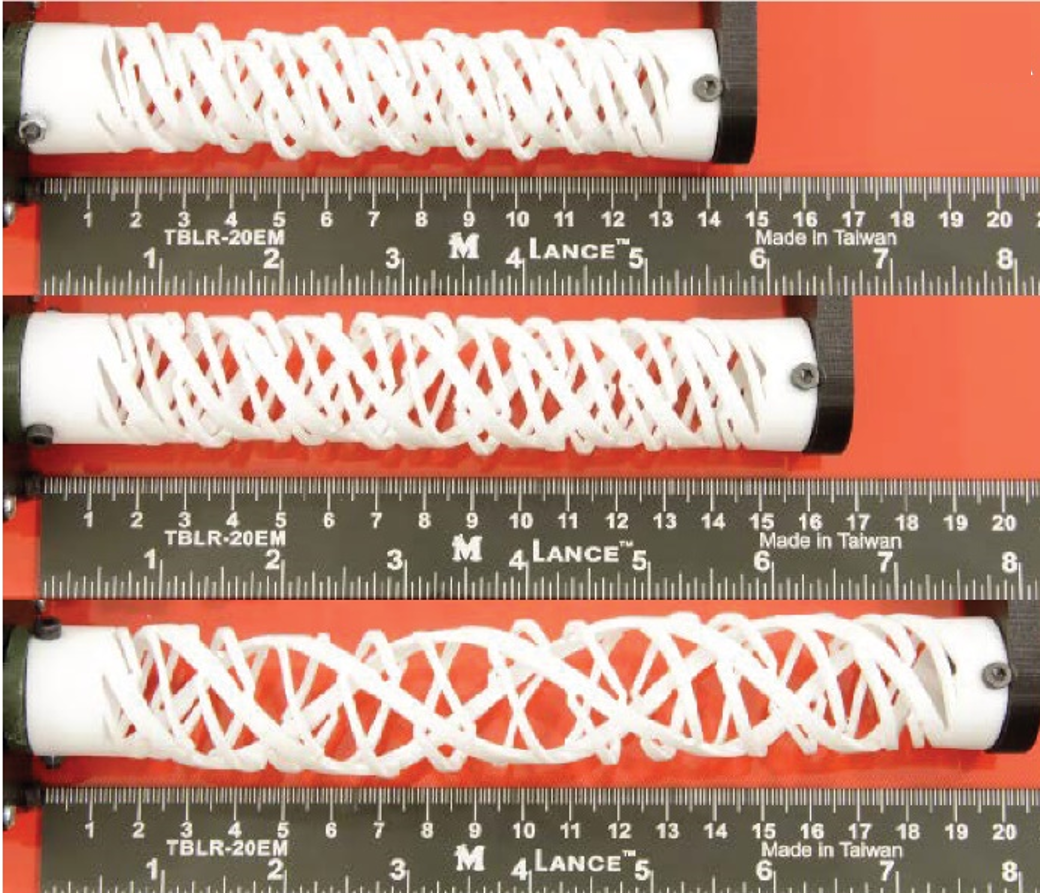
Lillian Chin, Jeffrey Lipton, Robert MacCurdy, John Romanishin, Chetan Sharma, Daniela Rus
RoboSoft 2018
Paper | Video
By combining handed shearing auxetics of opposite handedness together, we can create a linear actuator. By adding a constraint to the pattern, we can create soft fingers. From these building blocks, we create a 4 degree-of-freedom robotic platform that can extend up to 60% of its original length and twist up to 280 degrees. We also create a soft robotic hand that is 20x more power efficient and 2x faster than comparable pneuamtic-based soft hands, while achieving similar grasp performance.

Jeffrey Ian Lipton, Robert MacCurdy, Zachary Manchester, Lillian Chin, Daniel Cellucci, Daniela Rus
Science, 2018
Paper
Traditional auxetic materials have a unit cell that is symmetric. As the material expands, the unit cells rotate against each other until reaching a maximum point of expansion and collapsing down into the opposite symmetry. If we intentionally break this symmetry, we can create shear movement and make it impossible to collapse from one handedness to another. We call this handed shearing auxetics and demonstrate the potential for this class of material to create actuators.
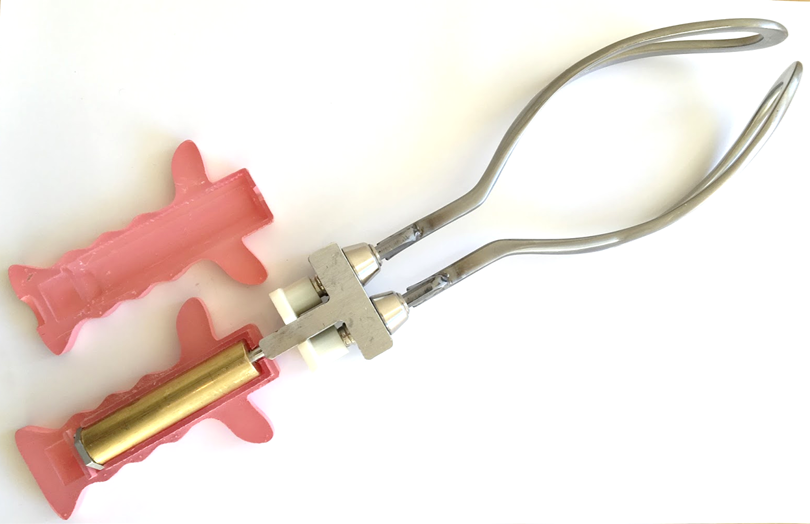
Judith M Beaudoin, Lillian T Chin, Hannah M Zlotnick, Thomas M Cervantes, Alexander H Slocum, Julian N Robinson, Sarah C Lassey
Design of Medical Devices 2018
Paper
We introduce a new design for obstetric forceps based on clinician feedback. To allow for delivery of babies in non-standard (non-occiput anterior) positions, we create forceps with a passively rotating handle and quick change blades for easier use. We also explore an additional sensing attachment to provide force / direction feedback to obstetricians to reduce the learning curve for forceps use.
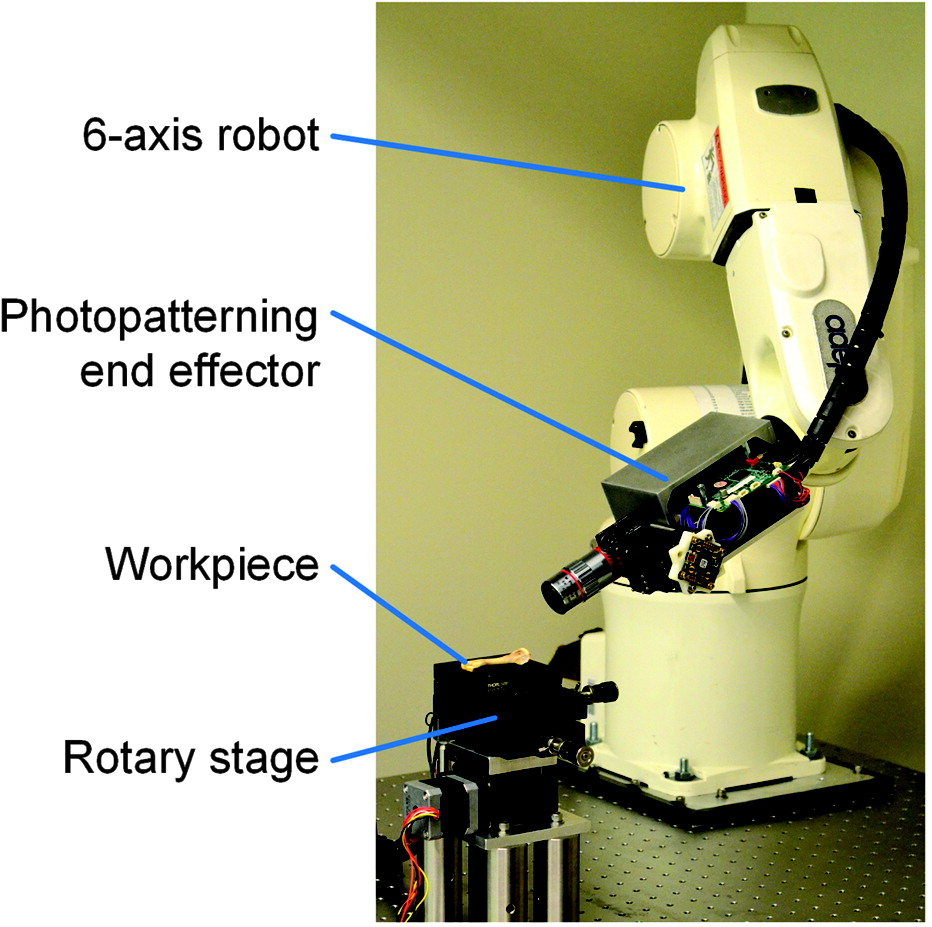
Adam G. Stevens, C. Ryan Oliver, Matthieu Kirchmeyer, Jieyuan Wu, Lillian Chin, Erik S. Polsen, Chad Archer, Casey Boyle, Jenna Garber, and A. John Hart
3D Printing and Additive Manufacturing, 2016
Paper
By attaching a projector to the end of a six-axis robot arm, we are able to perform stereolithography printing on curved surfaces. Rather than be limited to the standard planar layer of traditional 3D printing, we can create freeform high precision prints.